自搜索强化学习SSRL:探索Agentic RL在Sim2Real时刻的应用

本文由清华大学、上海人工智能实验室、上海交通大学等机构联合完成。第一作者为上海 AI Lab 博士生樊钰辰,研究方向是 Agent 以及强化学习;通讯作者为清华大学周伯文教授。
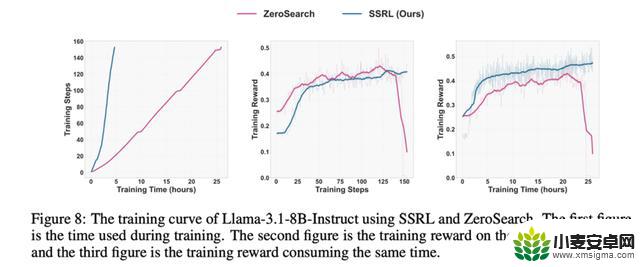
此前的 Agentic Search RL 任务大多采用真实搜索引擎,导致训练效率低,速度慢,稳定性差。ZeroSearch 探索利用另一个模型提供信息的训练方法,取得了较好的表现。然而,模型依赖自身世界知识能够达到的上限,以及如何有效利用自身世界知识,降低幻觉仍然是一个值得探究的问题。为研究这些问题,本文引入 SSRL。
SSRL 利用结构化的 prompt 和 format reward,有效地提取出了模型中的 world knowledge,在各个 benchmark 上取得了更好的效果,有效地降低了模型的幻觉。本文接着探索训练 agent 是否需要真实环境的参与,并发现在接入真实搜索引擎后,经过 SSRL 训练的模型可以取得更好的效果,体现了 Sim2Real 的有效性。
SSRL 所有训练数据,训练细节,以及训练模型均已开源。

一句话总结
本研究探索 SSRL,通过大语言模型 (LLM) 内部世界知识的利用,可以显著提升 Search Agent 的训练效率和稳定性。实验证明,该方法在多种基准测试中优于传统基于外部搜索引擎的方法,同时首次在 LLM 智能体领域实现了从模拟到真实 (Sim2Real) 的有效迁移。
一、动机
当前 RL 训练 Search Agent 主要有两种方式:
1. 全真实搜索 (Full-Real Search):直接调用商业搜索引擎 API 或检索增强生成 (RAG) 本地知识库
2. 半真实搜索 (Semi-Real Search):使用辅助 LLM 模拟搜索引擎行为
问题:
综上所述,目前的 Search Agent 训练非常昂贵,耗时,且不稳定。
如何能够降低训练成本与训练时间,同时能够稳定地训练 Search Agent 呢?
面对这些问题,我们首先进行了对于 LLM 依赖自身世界知识所能达到的效果的上限的探究。我们利用 structured prompt 诱发 LLM 自发地利用世界知识,并且通过 pass@k 证明了其极高的上限。受此启发,我们尝试用 RL 进一步强化模型利用自身世界知识的能力,探索 SSRL 的效果。在此基础上,我们首次在 LLM Agent 领域提出 Sim2Real,并验证 SSRL 训练的模型在真实场景的泛化性。
二、观察:LLM 利用世界知识的上限
对应 Agentic Search 任务 Pass@K 上限很高
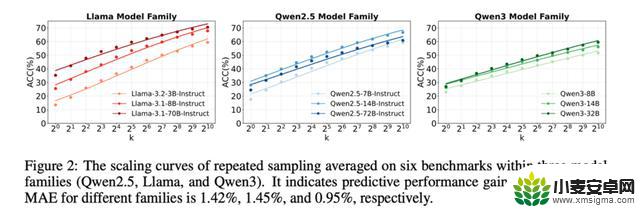
此前已经有研究证明 LLM 通过重复采样的方式可以在数学和代码取得极高的通过率,然而对于 LLM 利用自身世界知识回答 Search QA 类问题的上限还有待研究。我们首先使用一个 formatted instruction 来显式地利用模型内部知识(Self-Search)。
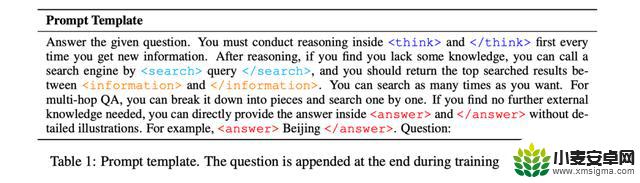
我们在大量的模型(包括 Qwen2.5,Qwen3,Llama3.1,Llama3.2)上进行了大量采样,实验结果显示,仅依赖模型内部知识,就可以在所有的 benchmark 上获得明显的效果提升,如 Llama-3.1-8B-Instruct 在 Bamboogle 上 pass@64 达到了 76% 的正确率,在 BrowseComp 上 pass@256 达到了 10% 的正确率。同时我们发现在这类任务上 Llama 系列效果远超 Qwen 系列,这和 math 上的结论恰恰相反。
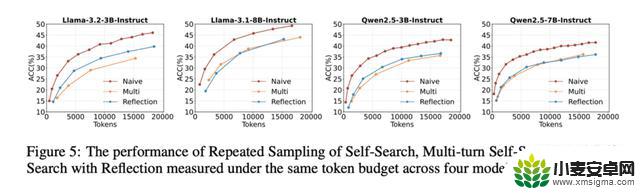
Thinking 越多效果不一定越好
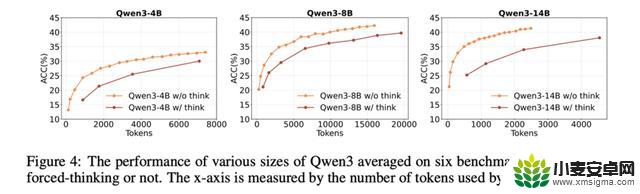
受启发于 Long-CoT LRM 的惊人表现,我们探究了 Long-CoT 对知识类的问题是否会有更好的表现。我们进行了三种 setting 的检验:
实验结果显示,过多的 thinking,或者 multi-turn 的生成在给定相同 token budget 的情况下未必可以取得更好的效果,这也和之前的 reasoning 工作中的结论相左。
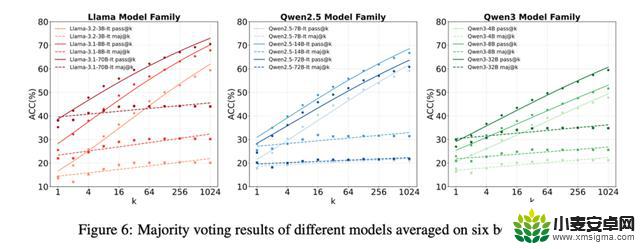
Pass@K 上限很高,但 Maj@N 达到上限很难
证明了 Self-Search 具有极高的上限后,我们尝试使用 Majority Voting 的方法进行投票选择。实验结果显示,仅仅依赖答案进行投票的方式无法逼近模型能力的上限,并且在增加参与 majority voting 的采样数量时,效果也不会获得进一步的提升。如何逼近 self-search 的 upper-bound 仍然是一个问题。
三、SSRL:自搜索强化学习
训练目标优化
标准的搜索 RL Search Agent 目标函数为:

由于 R(检索信息)来自策略本身,优化目标方程可以简化为一个标准的 GRPO 优化目标:

关键技术设计
1. 信息掩码(Information Masking)
和之前的 Search RL 工作一样,我们在训练时屏蔽 <information> 标签内的 token,从而强制模型基于查询和推理生成答案,而非简单复制。
2. 复合奖励函数
由于我们没有人为地干预模型的生成过程,因此需要一个 format reward 去规范模型的格式化输出,以更好地利用内部知识。同时,我们采用 outcome reward 防止 reward hacking,确保奖励的有效性。

实验结果
我们在 Llama 系列和 Qwen2. 5 系列上进行了训练,实验结果如下:
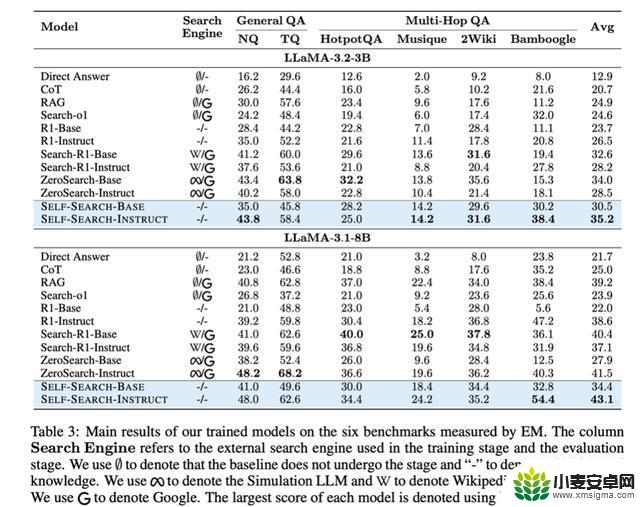
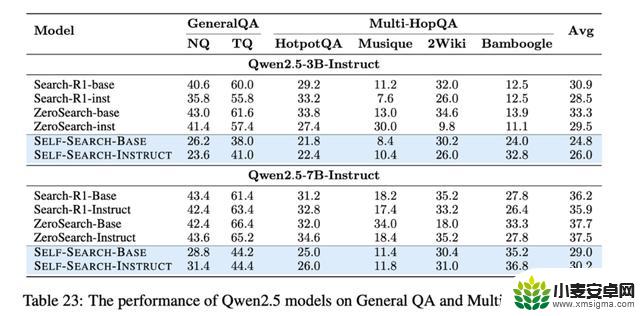
可以看到:
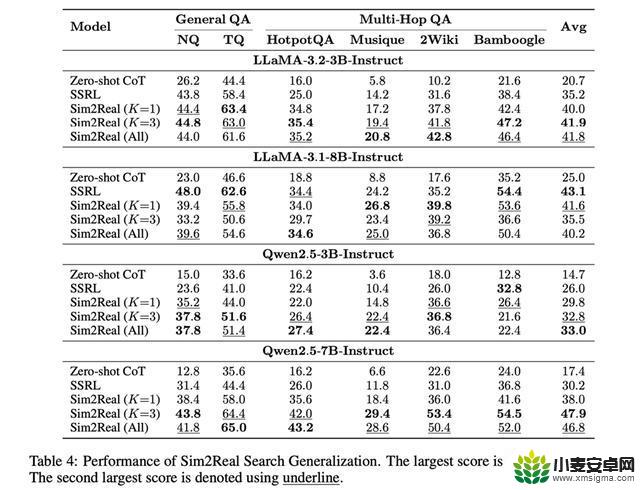
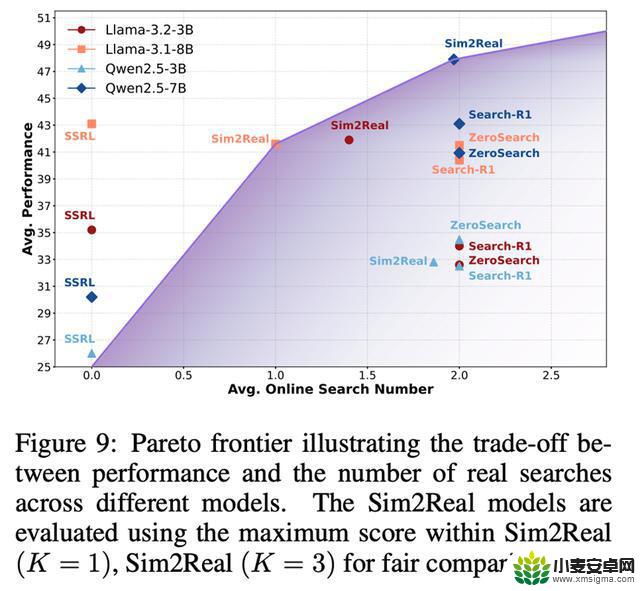
四、Sim2Real Generalization
由于 Search 任务是和真实世界高度相关的,因此能够结合真实搜索去实时地解决问题也是非常重要的。在这个工作中,我们探究了 SSRL 训练的模型是否具有在真实世界搜索并推理的能力,我们称为 Sim2Real。
替换 Self-Searched Knowledge 为 Online-Searched Information
首先我们进行实验,将前 K 个 Self-Searched Knowledge 用在线搜索获得的结果进行替换,我们发现
结合 Self-Generated Knowledge 和 Real-world Knowledge
此前我们已经证明了,真实世界的知识和模型生成的知识都各有其优越性,如何有机地在 SSRL 的背景下利用他们也是一个值得考虑的问题。我们首次提出 entropy-guided search,我们首先提取出 search content,如果呈现熵增趋势,表明模型具有不确定性,我们应当寻求外部工具的帮助,如果熵减,则使用模型生成的知识。实验结果如下:
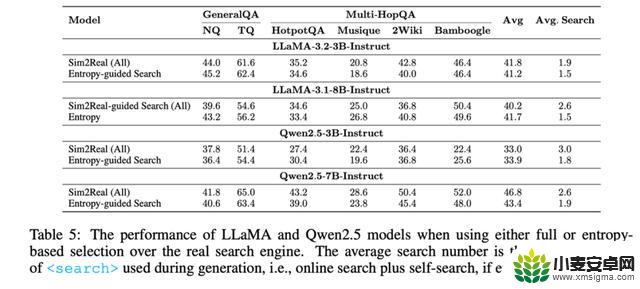
实验结果显示,Search 次数相比于之前减少了 20%-42%,而实验效果可以取得一个 comparable 的表现,但这只是一个初步的尝试,更精细的结合方法仍是一个问题。
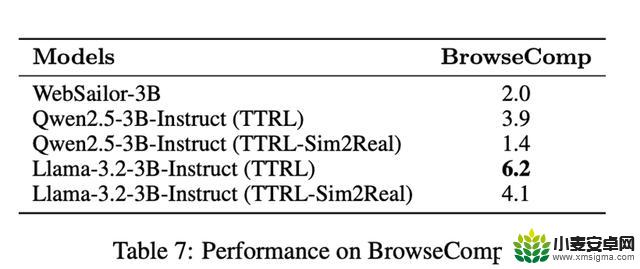
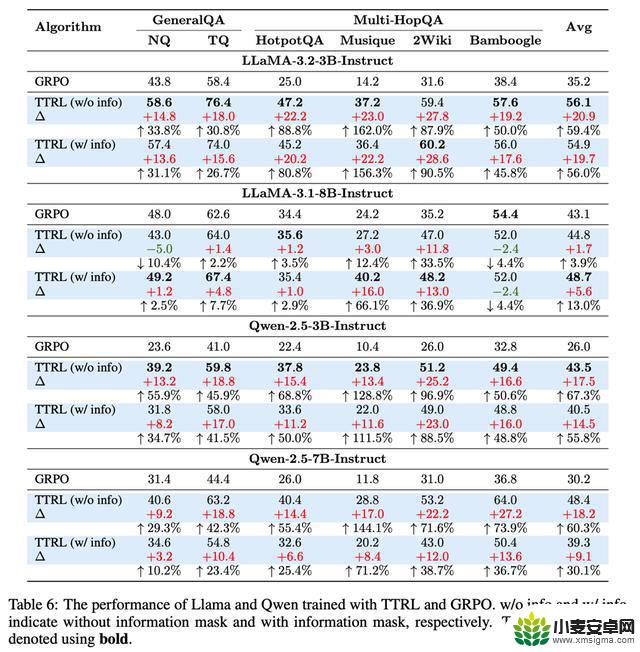
五、SSRL 和 TTRL 的结合
我们尝试 SSRL 和 TTRL 相结合,证明 SSRL 的泛化性和有效性。可以发现,当使用 TTRL 时,相比于 GRPO-based SSRL,我们可以取得更好的效果,甚至可以获得 67% 的效果提升。
甚至在最为困难的 BrowseComp 上,我们仍然能够获得稳定的增长。然而我们观察到,使用 TTRL 时,模型会变得过于 confident,模型塌缩到每个问题只会搜索一次,且模型会学会一个捷径,即先指出最后的答案,再通过 search 去 verify。此外,TTRL 也非常容易崩溃,Training reward 会极速下降到 0。